![]()
![]()
(3.2)
|
Obsah kapitoly: |
3.3.1 Matematický popis chování spojitého akčního členu |
Akční člen je technické zařízení, které přenáší výstupní signál z regulátoru (akční zásah) do regulované soustavy, tj. mění hodnotu nějaké technologické veličiny podle hodnoty výstupu z regulátoru.
Akční členy mohou být dvoupolohové nebo spojité. Dvoupolohové se mohou nastavovat pouze do dvou poloh, obvykle "otevřeno" a "uzavřeno" a hodí se pouze pro méně náročné regulace a pro logické řízení. Spojité akční členy se mohou nastavovat podle hodnoty řídicího signálu do jakékoli polohy mezi danými mezemi.
3.3.1 Matematický popis chování spojitého akčního členu
Vztah mezi vstupem a výstupem akčního členu je nejčastěji lineární, tedy matematicky popsán rovnicí
|
|
u = rA v |
|
(3.1) |
kde je v signál z regulátoru, u výstup akčního členu a rA zesílení akčního členu.
Rovnice (3.1) vyjadřuje ideální chování, to znamená, že akční člen reaguje na změny vstupního signálu bez vlastního zpoždění. Ve skutečnosti tomu tak není a reálný akční člen můžeme např. zjednodušeně chápat jako soustavu 1.řádu, tedy s matematickým popisem
|
|
|
|
(3.2) |
kde TA je časová konstanta vyjadřující zpoždění akčního členu.
| na začátek kapitoly |
3.3.2 Vlastnosti regulačního ventilu
Nejčastěji používaným akčním členem v chemické a potravinářské technologii je regulační ventil. Slouží k ovládání průtoků tekutých médií. Jeho princip je stejný jako u běžných ventilů, tj. průtok tekutiny je ovládán posunem kuželky vůči sedlu. Průtočnou charakteristikou ventilu obecně rozumíme závislost průtoku Q na zdvihu kuželky (poloze vůči sedlu) x za konstantních podmínek (hustota a viskozita tekutiny a tlakový spád na ventilu). Základním požadavkem je, aby regulační ventil měl lineární průtočnou charakteristiku (obr. 3.16). Ta se obvykle vyjadřuje jako závislost bezrozměrného průtoku F na bezrozměrném zdvihu z , které jsou definovány vztahy
|
|
|
|
kde jsou Qmax maximální průtok a xR maximální (tzv. jmenovitý) zdvih. Lineární průtočná charakteristika zajišťuje, že stejná změna zdvihu způsobí vždy stejnou změnu průtoku bez ohledu na to, jaký průtok právě je, tj. ve kterém místě průtočné charakteristiky se právě nacházíme. Tato vlastnost ventilu je velmi důležitá pro kvalitu regulačního pochodu.
|
|
| Obr. 3.16 Lineární průtočná charakteristika ventilu |
Matematicky je průtok kapaliny Q regulačním ventilem funkcí bezrozměrného zdvihu z a je dán vztahem
|
|
|
|
(3.3) |
kde m je směrnice přímky vyjadřující charakteristiku ventilu (při F0 = 0,02 je m = 0,98), Dp je tlakový spád na ventilu (rozdíl tlaků před a za ventilem), r je hustota protékající kapaliny a KV je tzv. jmenovitá kapacita ventilu, která je určena jeho konstrukcí. Hodnota KV udává maximální průtok vody (vyjádřený v m3/h) plně otevřeným ventilem za normou stanovených podmínek (teplota 20 °C, tlakový spád na ventilu 100 kPa) a uvádí ji výrobce ventilů ve svém katalogu. Hodnota F0 znamená průtok při zcela uzavřeném ventilu, tzv. netěsnost ventilu. V současné době se vyrábějí již velmi dokonalé ventily, jejichž netěsnost je prakticky nulová. Směrnice charakteristiky m se pak rovná jedné a rovnice (3.3) se zjednoduší na
|
|
|
|
(3.4) |
Při konstantním tlakovém spádu a hustotě je tato rovnice analogická rovnici ideálního akčního členu (3.1):
|
|
|
|
(3.5) |
| na začátek kapitoly |
3.3.3 Konstrukční principy regulačních orgánů
Konstrukční řešení nejčastěji používaných regulačních ventilů s pneumatickým pohonem je schématicky znázorněno na obr. 3.17. Jako ovládací signál zde slouží tlak vzduchu ve standardizovaném rozmezí 20 - 100 kPa. Ventily s pneumatickým pohonem mohou být přímočinné (přímé), které se s růstem tlaku otevírají, a nepřímočinné (nepřímé), které se s růstem tlaku uzavírají. Volba typu ventilu souvisí s tím, jaký stav má nastat při výpadku ovládacího signálu nebo pomocné energie: pokud se má ventil uzavřít, volíme přímý, pokud se má otevřít, volíme nepřímý.
|
|
|
Obr. 3.17 Schématický řez pneumatickým regulačním ventilem |
Běžný jednosedlový ventil má však jednu podstatnou nevýhodu, která vyplývá ze schématu na obr. 3.18 vlevo: tlak v potrubí před ventilem působí silou na kuželku (směr síly je označen šipkou) a pohon ventilu musí vyvíjet značnou sílu, aby kuželku udržel v požadované poloze. Proto se při vyšších tlacích používají ventily dvousedlové se dvěma kuželkami (obr. 3.18 vpravo), kde se síly působící na kuželky (viz šipky) vzájemně vyrovnávají a síla pohonu je potřebná pouze na překonání tření v ucpávkách. Dvousedlové ventily jsou však dražší, protože jejich výroba je mpři dodržení požadavku linearity charakteristiky značně náročná.
|
|
|
Obr. 3.18 Schématický řez jednosedlovým a dvousedlovým ventilem |
Dalším běžně používaným akčním členem je regulační klapka. Její schéma je na obr. 3.19. Používá se především pro páru a plyny a hlavně u potrubí větších průměrů. Vhodná je i pro kalné kapaliny, protože se tak snadno nezanáší. Její hlavní nevýhodou je, že její charakteristika je značně nelineární, takže konstrukce regulačních obvodů s klapkou je obtížnější a nastavování regulátoru poněkud komplikovanější.
|
|
| Obr. 3.19 Schéma regulační klapky |
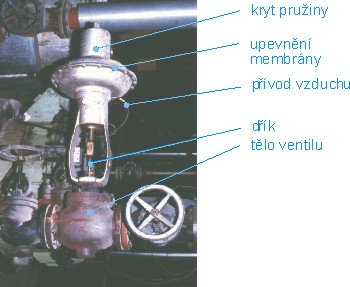
Následující dvě fotografie jsou z cukrovaru a ukazují skutečný regulační ventil, v tomto případě na regulaci páry do zahřívače. Na prvním z nich je celkový pohled na ventil a jsou na něm vyznačeny některé části, aby bylo možné porovnat skutečnost se schématem na obr. 3.17.
|
|
|
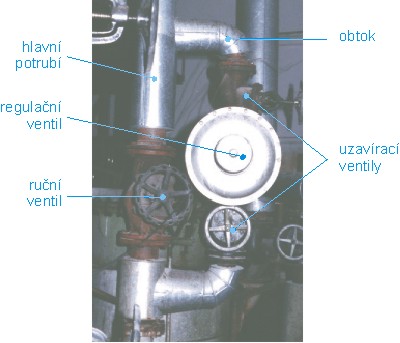
Regulační ventil se obvykle montuje do obtokového potrubí mezi dva uzavírací ventily, jak je vidět z dalšího obrázku. Je to proto, aby mohl být za provozu opraven nebo vyměněn. Za běžného provozu je ruční ventil na hlavním potrubí uzavřen a médium prochází přes regulační ventil v obtoku. Při opravě se uzavřou ruční ventily v obtoku a otevře ventil v hlavním potrubí. Tok média se sice musí ovládat ručně, ale regulační ventil lze opravit nebo vyměnit a pak vrátit vše do původního stavu. |
|
|
| na začátek kapitoly |