Obr. 4.1 Měřicí řetězec
4.1 Základní vlastnosti měřicích přístrojů
|
Obsah kapitoly: |
Měřicí přístroj je obecně zařízení, které zpracovává vstupní veličinu x na výstupní veličinu y na základě určitého fyzikálního principu, použitého při konstrukci přístroje. Vstupní (měřená) veličina je přetvářena přístrojem na jinou veličinu (údaj přístroje), lišící se od původní veličiny kvalitativními znaky. Tvar a velikost výstupní veličiny se řídí účelem, pro který je přístroj určen. Podle vstupní veličiny bývá přístroj pojmenován, tvar signálu výstupní veličiny pak určuje, zda jde o měřicí přístroj analogový či digitální.
4.1.1 Měřicí přístroj a jeho skladba
Měřicí přístroj je technický prostředek sloužící k převodu měřené veličiny na příslušnou indikaci. Měřicí přístroj může být jednoduchý a tvořit jeden konstrukční celek, ale může být i složitý a skládat se z více konstrukčních celků. V takovém případě hovoříme o měřicím zařízení.
Měřicí zařízení je souprava technických prostředků určených k provádění měření a zahrnující všechna měřidla a další pomocná měřicí zařízení nezbytná k aplikaci dané metody.
Snímaní veličiny je spojeno s principem měření, což je fyzikální jev nebo souhrn fyzikálních jevů, na kterých je měření založeno. Postup měření je sled úkonů nutných k provedení měření. Veličina může být měřena buď přímo nebo její hodnotu vypočteme na základě přímého měření jiných veličin. Podle toho pak rozeznáváme měřicí metody přímé a nepřímé.
Měřicí přístroj, případně měřicí zařízení, představuje v podstatě řetězec bloků tzv. měřicí řetězec, v němž dochází k transformaci měřené veličiny, která je veličinou vstupní, na veličinu výstupní, tj. údaj měřicího přístroje. Měřicím řetězcem rozumíme sled jednotlivých prvků mezi snímačem, který je prvním článkem řetězce a vyhodnocovacím zařízením, které je jeho posledním článkem (obr. 4.1).
|
|
|
Obr. 4.1 Měřicí řetězec |
Snímač (senzor) slouží ke spojitému snímání údajů odvozených od měřené veličiny. Citlivou částí snímače, jež je v přímém styku s měřeným prostředím je čidlo. Vztah mezi hodnotou výstupního signálu snímače a hodnotou měřené veličiny odpovídá určitému fyzikálnímu zákonu.
Převodník převádí výstupní veličinu snímače na veličinu vhodnou pro další zpracování. Ve většině případů vyžaduje převodník přívod pomocné energie. Snímač spolu s převodníkem tvoří často jeden konstrukční celek, označovaný jako vysílač měřené veličiny. Výstupem z převodníku nebo z vysílače bývá často tzv. unifikovaný signál, který se pohybuje v přesně definovaném rozmezí. Např. proudový signál 0 až 20 mA, nebo 4 až 20 mA, napěťový signál 0 až 10 V nebo -10 až +10 V, pneumatický signál 20 až 100 kPa.
Vyhodnocovací zařízení tvoří soubor ústrojí, které zpracovává výstupní signál z převodníku a udává jej např. ve formě výchylky ukazovatel na stupnici, zápisu na registračním papíru, ve formě čísla apod. Vyhodnocovací zařízení tvoří u jednoduchých přístrojů jeden konstrukční celek se snímačem a převodníkem (např. deformační tlakoměr) nebo je zcela samostatnou částí (registrační přístroj, zobrazovací displej, tiskárna apod.).
Měřicí přístroj slouží k zachycení a zpracování informace o měřené veličině. Nositelem informace je signál, který je přestavován změnami fyzikálních veličin a jejich velikost slouží jako tzv. informační parametr.
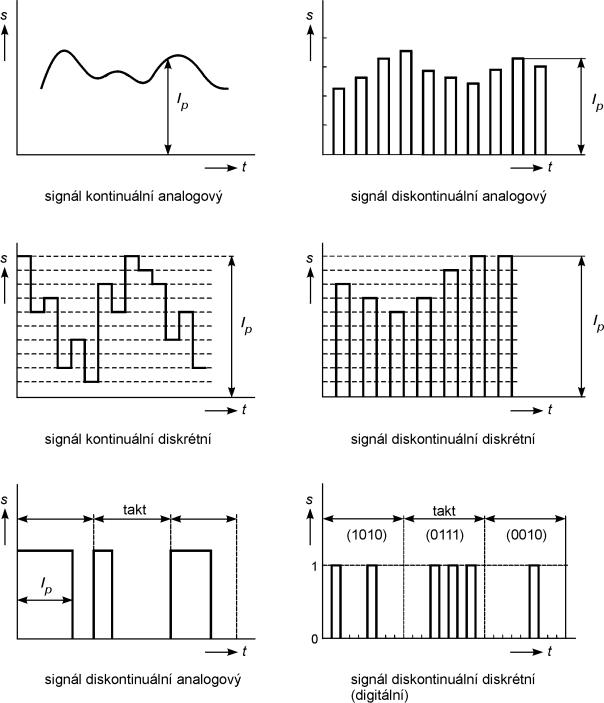
Podle poměrů, které nastávají při přenosu a zpracování signálu se setkáváme se signály kontinuálními a diskontinuálními, se signály analogovými a diskrétními. Speciálními druhy diskrétních signálů jsou signály digitální. U analogových signálů můžeme odečíst libovolnou hodnotu informačního parametru v daném měřicím rozsahu. U diskrétních signálů může informační parametr nabývat jen konečného počtu diskrétních hodnot; informační parametr je kvantován. U signálů kontinuálních se informační parametr zjišťuje nepřetržitě, u signálů diskontinuálních se informační parametr zjišťuje v určitých časových intervalech. Na obr. 4.2 jsou uvedeny příklady jednotlivých druhů signálů.
|
|
|
Obr. 4.2 Druhy signálů t - čas, s - signál, Ip - informační parametr |
Podle způsobu vyhodnocení rozdělujeme měřicí přístroje na analogové a číslicové. U analogových měřicích přístrojů je přiřazena každé hodnotě měřené veličiny určitá hodnota jiné fyzikální veličiny s analogickým průběhem závislosti signálu. Číslicové měřicí přístroje poskytují diskrétní výstupní signál a udávají měřenou veličinu číselně násobkem základního kvanta signálu.
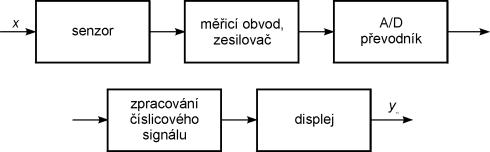
Na obr. 4.3 je nakresleno blokové schéma číslicového měřicího přístroje. Ze schématu je patrné, že měřicí řetězec zahrnuje vedle senzoru zesilovač, který upravuje signál na úroveň vhodnou pro další zpracování, analogově-digitální převodník, který slouží k převodu analogového signálu na signál číslicový a koncovým blokem řetězce je displej pro zobrazení výstupního údaje přístroje.
|
|
|
Obr. 4.3 Blokové schéma číslicového měřicího přístroje x – měřená veličina, y – digitální signál |
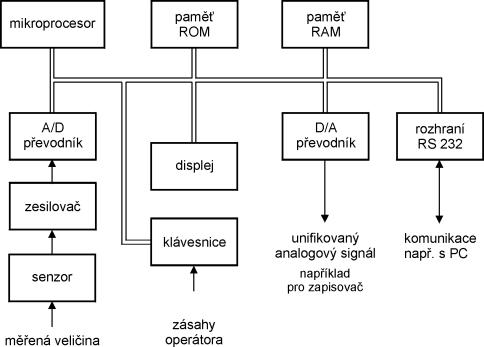
U moderních měřicích přístrojů bývá často proces měření řízen mikroprocesorem. Blokové schéma měřicího přístroje řízeného mikroprocesorem je znázorněno na obr. 4.4. Stěžejním blokem je mikroprocesor, což je programovatelný logický obvod, který komunikuje s ostatními bloky prostřednictvím datové, řídicí a adresové sběrnice (ve schématu je sběrnice znázorněna dvojitou čarou). Paměť ROM (Read Only Memory) slouží pouze pro čtení a je v ní uložen mimo jiné základní program pro řízení procesu měření. Paměť RAM (Random Axcess Memory) umožňuje zápis i čtení dat a slouží například k uložení naměřených dat, kalibračních konstant apod. Operátor komunikuje s přístrojem prostřednictvím klávesnice a displeje. Digitálně-analogový převodník slouží k převodu číslicového signálu na analogový signál. Rozhraní RS 232 je elektronický obvod umožňující komunikaci přístroje s počítačem.
|
|
|
Obr. 4.4 Měřicí přístroj řízený mikroprocesorem |
![]() Přístroje
řízené mikroprocesorem vykazují řadu předností:
Přístroje
řízené mikroprocesorem vykazují řadu předností:
• možnost konfigurace vlastností přístroje podle požadavků uživatele
• možnost připojení několika druhů senzorů
• možnost úpravy statické charakteristiky (posun nulového bodu, změna směrnice)
• potlačení rušivého vlivu ovlivňujících veličin
• signalizace mezních stavů
• možnost konfigurace analogového výstupního signálu
• možnost komunikace přístroje s počítačem
• blokování proti nežádoucím zásahům
| na začátek kapitoly |
4.1.2 Charakteristické vlastnosti měřicích přístrojů
Z hlediska automatického řízení rozumíme pod pojmem měřicí přístroj (měřicí zařízení) vlastně měřicí člen regulátoru. Chování měřicího přístroje, podobně jako chování kteréhokoli bloku regulačního obvodu, můžeme sledovat buď v ustáleném stavu a tomu odpovídají statické vlastnosti nebo při přechodu z jednoho ustáleného stavu do druhého, tj. během přechodového děje, kterému odpovídají vlastnosti dynamické. Znalost statických a dynamických vlastností nám napomůže rozhodnout o vhodnosti měřicího přístroje pro požadovaný účel. Dalšími důležitými vlastnostmi měřicích přístrojů jsou jejich spolehlivost a životnost. K nejdůležitějším statickým vlastnostem měřicích přístrojů patří: statická charakteristika, citlivost, rozsah a přesnost.
Statická charakteristika měřicího přístroje udává závislost výstupní veličiny (údaje přístroje) na vstupní (měřené) veličině v ustálených stavech. Získává se měřením tak, že se vstupní veličina postupně nastavuje na předem zvolené hodnoty, a to pozvolna bez překmitnutí, nejprve směrem k maximální hodnotě, a pak zpět k začátku rozsahu. Statická charakteristika, zjištěná při referenčních podmínkách, se označuje jako základní charakteristika.
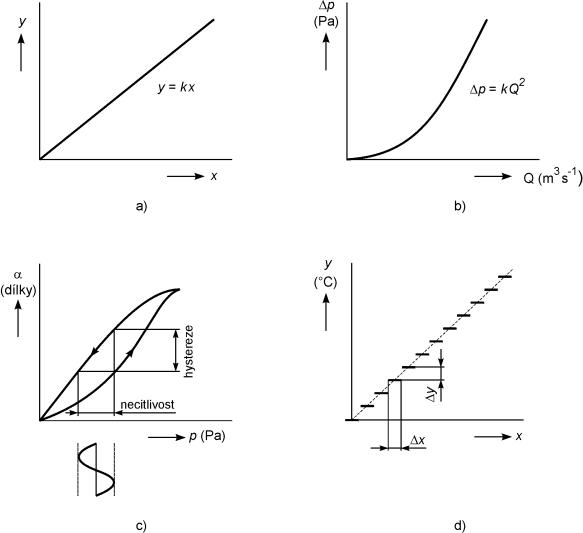
Statickou charakteristiku vyjadřujeme buď matematickým vztahem nebo graficky. Průběh statické charakteristiky měřicího přístroje musí vždy odpovídat monotónní funkci, charakteristika nesmí vykazovat extrém. Na obr. 4.5 jsou zakresleny některé průběhy statických charakteristik měřicích přístrojů.
|
|
|
Obr. 4.5 Příklady průběhu statických charakteristik měřicích přístrojů a) lineární b) nelineární c) charakteristika s hysterezí d) charakteristika digitálního přístroje |
U přístrojů s hysterezí má statická charakteristika odlišné průběhy při zvětšování a při snižování hodnoty měřené veličiny. Z naměřeného průběhu lze odečíst hysterezi a pásmo necitlivosti přístroje (obr. 4.5c). V obou případech se udává maximální zjištěná hodnota příslušného rozdílu.
Pásmo necitlivosti je maximální rozmezí hodnot vstupního signálu při jeho střídavém zvyšování a snižování, při kterém ještě nevzniká zaznamenatelná změna údaje od ustálené hodnoty.
Hystereze je absolutní hodnota největšího rozdílu mezi hodnotami výstupního signálu, odpovídající jedné a téže hodnotě vstupního signálu, při přiblížení se k ní od krajních hodnot bez překmitu.
Ze statické charakteristiky číslicového měřidla (obr. 4.5d) je na první podhled zřejmý vliv chyby způsobené kvantováním.
Každý měřicí přístroj je charakterizován rozsahem měření což je interval mezi dolní a horní mezí veličiny (signálu). Údaj měřicího přístroje je zatížen chybami, jejichž velikost závisí na samotném principu měřidla a na kvalitě jeho výroby.
Základní chybou rozumíme celkovou chybu přístroje jestliže je používán za zcela jednoznačně předepsaných, tzv. referenčních podmínek. Je-li používán za jiných podmínek, vznikají chyby doplňkové (přídavné).
Doplňková (přídavná) chyba je způsobena změnou jedné z ovlivňujících veličin od referenčních podmínek. Doplňková chyba se definuje pro každou ovlivňující veličinu zvlášť.
Ovlivňující veličina je veličina, která sama není předmětem měření, ale která ovlivňuje výsledek. Může to být např. teplota, tlak, napájecí napětí, poloha přístroje apod.
Jednotlivé ovlivňující veličiny se dále určují hodnotou a rozsahem, čímž se vymezuje jejich vliv na hlavní parametry přístroje.
Citlivost měřicího přístroje je poměr změny hodnoty výstupního signálu Dy ku změně měřené veličiny Dx:
|
|
|
|
(4.1) |
Poněvadž v praxi nelze splnit požadavek Dx ® 0, vyjadřuje se citlivost přibližným výrazem, který je dán podílem změny údaje odpovídající zpravidla nejmenšímu dílku čárkové stupnice Dy0 k příslušné změně hodnoty měřené veličiny Dx0. Takto lze stanovit citlivost experimentálně:
|
|
|
|
(4.2) |
Citlivost číslicových přístrojů je dána změnou údaje o jeden digit (změna o jednotku u poslední platné číslice) vyvolanou příslušnou změnou hodnoty měřené veličiny. U přístrojů s lineární statickou charakteristikou je citlivost konstantní v celém rozsahu měření. V případě nelineární charakteristiky se citlivost mění.
Pokud se týká dynamických vlastností, měřicí přístroje se chovají v podstatě jako statické systémy se zpožděním n-tého řadu; některé přístroje, např. analyzátory složení, reagují jako systémy s dopravním zpožděním. Chování ideálního měřicího přístroje odpovídá vlastnostem bloku nultého řádu bez dopravního zpoždění. Znalost dynamických vlastností měřicího přístroje je velmi důležitá pro měření veličin, jejichž hodnota se rychle mění s časem, tj. například pro měření okamžitých hodnot veličin a pro účely řízení technologických procesů. Nevhodně volený přístroj, tzn. přístroj s nepříznivými dynamickými vlastnostmi, nebude přesně udávat hodnotu rychle se měnící veličiny. Výstupní signál přístroje se bude opožďovat za změnou hodnoty měřené veličiny, údaj bude zatížen značnou dynamickou chybou.
Dynamická chyba ed je rozdíl mezi hodnotou výstupní veličiny měřicího přístroje (údajem přístroje) a hodnotou výstupní veličiny ideálního přístroje, popsaného rovnicí nultého řádu, který má shodné statické vlastnosti.
|
|
|
|
(4.3) |
Měřicí přístroj s ideálními dynamickými vlastnostmi bude odpovídat ideálnímu proporcionálními členu s přenosem F(p)id = k. Dynamická chyba je funkcí času a závisí jak na dynamických vlastnostech měřicího přístroje, tak i na časovém průběhu měřené veličiny. Dynamické chyby je možno v některých případech spočítat a potom eliminovat.
Znalost dynamických chyb je zvlášť důležitá při měření okamžitých hodnot rychle se měnících měřených veličin. Značných hodnot mohou nabývat dynamické chyby například u teploměrných snímačů uložených v ochranných jímkách, u vlhkoměrů, jejichž činnost je spojena s vybavením či spotřebou tepla, nebo u samočinných analyzátorů, v jejichž obvodu je zařazen pomocný absorbér, desorbér či reaktor. Velikost dynamických chyb nás bude zajímat i u takových měření, která se opakují v pravidelných intervalech, jak je tomu u diskontinuálních měřicích přístrojů (např. provozní chromatograf) a u měřicích ústředen. V této souvislosti je zapotřebí řešit otázku volby kmitočtu vzorkování měřených veličin.
U některých moderních měřicích zařízení vybavených mikroprocesorem je možno velikost dynamické chyby spočítat a provést automaticky korekci výstupního údaje.
V souvislosti se základními vlastnostmi měřicích přístrojů se zmíníme závěrem o kvalitě měřicího přístroje. Jedná se o soubor vlastností a znaků určujících a zajišťujících použitelnost měřidla pro požadovaný úkol. Nejdůležitějšími kvalitativními znaky měřicích přístrojů jsou:
· funkční způsobilost (přesnost, citlivost, dynamické vlastnosti, spolehlivost, životnost),
· odolnost proti škodlivým účinkům prostředí, proti vibracím a otřesům,
· jednoduchá justáž (seřízení),
· snadná montáž či demontáž,
· jednoduchost a snadnost čtení údaje,
· snadná údržba,
· malá hmotnost,
· vzhled a povrchová úprava,
· přiměřená cena.
| na začátek kapitoly |